μEDM — Konzept und Aufbau

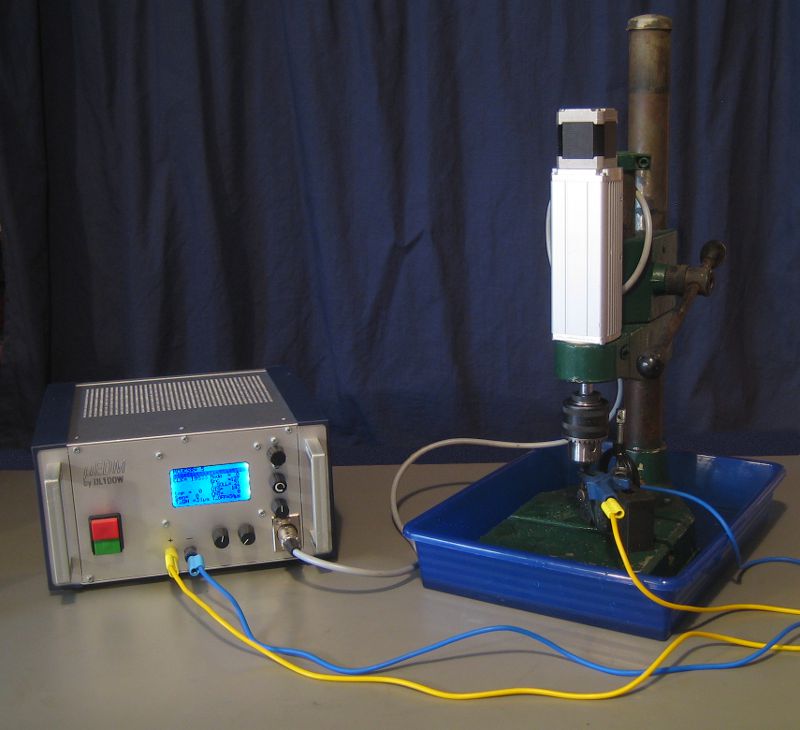
μEDM Grundgerät und Vorschubantrieb (klicken zum
vergrößern): Im Grundgerät(links) sind sämtliche
elektrische Komponenten untergebracht. Der Vorschubantrieb (rechts)
wird in einen herkömmlichen Bohrständer eingespannt.
(Zum Vergrößern auf das Bild klicken)

Schematischer Systemaufbau
(Zum Vergrößern auf das Bild klicken)

Innenaufbau des Steuergeräts (Zum Vergrößern auf das Bild klicken):
Netzteil (A), Steuer-/Bedienteil (B), Schrittmotortreiber (C),
Leistungsteil Funkenerzeugung (D) und Lastwiderstand (E).
(Zum Vergrößern auf das Bild klicken)
Der Senkerodierer besteht aus drei Hauptkomponenten:
- Grundgerät zur Steuerung und Pulserzeugung
- Vorschubantrieb mit Elektrodenhalterung
- Spülkreislauf (nicht auf dem Foto)
Elektrik/Grundgerät
Das Grundgerät beinhaltet sämtliche elektrische Komponenten des
μEDMs, bestehend aus der Pulserzeugung für den Erodierprozeß,
der Vorschubregelung und der Bedienerschnittstelle.
Es bietet die folgenden Merkmale:
- Spitzenstrom 18A, momentan noch begrenzt auf 10A
- Pulsfrequenz 8kHz—250kHz mit wählbarem Tastverhältnis
bis max. 0,5
- Leerlaufspannung 70V (potenzialfrei, nicht einstellbar)
- Vorschubantrieb mit Tiefenregelung und automatischem Rückzug
Es ist komplett potenzialfrei und findet in einem kompakten 10-Zoll-Systemgehäuse
Platz.
Vorschubantrieb
Die Vorschubantrieb hat den Zweck, die Elektrode in das Werkstück
einzuführen. Obwohl die kompakte Einheit auf den ersten Blick wie eine
kleine Bohrmaschine
aussieht, dreht sich das Bohrfutter nicht, sondern kann nur axial verfahren
werden. Das Gehäuse ist mit einem 43mm-Eurohals ausgestattet und kann
damit in einem normalen Bohrständer oder der
Spindelhalterung meiner
CNC-Fräse genutzt werden.
Spülung
Das Dielektrikum für den Erodierprozeß wird mit der
Spülvorrichtung zugeführt, um die Funkenstrecke einerseits immer
innerhalb der Flüssigkeit zu halten, andererseits entstehende
Partikel abzuführen.
Im folgenden werden die Komponenten einzeln vorgestellt:
weiter...
DL1DOW
German Amateur Radio Station